|
Control of Power Wheelchair
using EMG Signals and
Guided-Underdetermined Source Signal Separation
by
Luis Rivera
Introduction
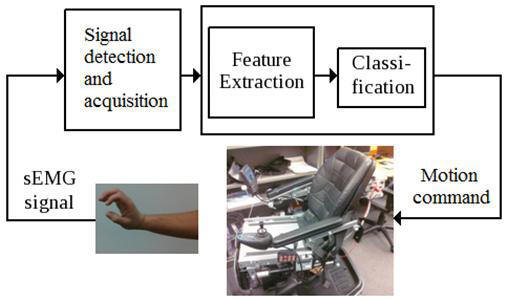
Surface Electromyographic signals (sEMG)
find applications in many areas such as rehabilitation, prosthesis and
human-machine interaction. Systems reliant on these muscle-generated electrical
signals require various forms of machine learning algorithms for recognition of
specific signatures. Those systems vary in terms of the signal detection
methods, the feature selection and the classification algorithm used, however,
in all those cases, the use of multiple sensors and complex analysis and
classification algorithms are constant requirements. In this research, we
developed a power wheelchair control system that relies on a single sEMG sensor
and a new technique for signature recognition that we call Guided
Under-determined Source Signal Separation (GUSSS). Compared to other approaches
in the literature, the proposed technique relies on a much simpler classifier
and uses a very small number of features to achieve reasonable results.
Demo
2 Video -
Demo 1 Video: You will notice three electrodes -- one ground and two as a differencial pair -- but there is actually only one sEMG signal being captured.
Hardware Description: The main components include the
equipment for acquiring EMG signals, the control module mounted
on the back of the wheelchair to process the signals and a
display to provide visual feedback on the selected commands.
The control module is connected to the existing joystick
interface to move the wheelchair.
In the video, you will see 3 boxes in the back of the wheelchair.
These have been replaced by a single box with a commercial
embedded device and two custom-made add-on cards -- including
our own EMG sensor technology.
The cost of all the required hardware is under $100.
Hardware Video
Training: Unlike other technologies also reliant on
EMG signals, we have developed a novel software system which
requires only one electrode in order to recognize the same types
of muscular patterns (e.g. hand gestures, eyebrow movements,
etc) to control the movement of the wheelchair. During the
training, the user selects the muscle movement to be
associated with an intended wheelchair command. The use of only
one signal allows our system to be deployed alternatively and/or
simultaneously in multiple parts of the body – dependent on the
user’s abilities. For this video, we have positioned the
electrode on the forearm (shown in the driving video), thus
selecting wrist/hand motions to control the wheelchair.
Repeating the gesture during the training session allows the
unique software system to learn the gesture and associate it
with a motion command to the wheelchair. The video was edited
for length. But from the sequence presented, one should be
able to infer that the total time for training is under 5min.
Training Video
Driving: The goal here was to present how gestures are
used to drive the chair, as opposed to a more typical driving
experience -- for ex, the current maximum speeds (turn and
forward) were reduced for testing and demonstration purposes).
The electrode is placed over the forearm and the hand/wrist
motions used to control the wheelchair are the same as
identified in the training video. The intended wheelchair
command associated with that muscle movement is communicated
through any joystick analog interface.
Driving Video
User Feedback: This video was produced to demonstrate
the visual feedback provided by the system to the user.
Through this feedback, the user can visually confirm what
motion command the system is sending to the wheelchair as a
function of the detected gesture by the user.
Feedback Video
References
-
Rivera, L. A. and DeSouza, G. N. “A Power
Wheelchair Controlled Using Hand Gestures, a Single sEMG Sensor, and
Guided Under-determined Source Signal Separation”. IEEE 4th RAS and EMBS International Conference on Biomedical Robotics BioRob2012,
pp.1535-1540,
June, 2012. Rome, Italy.
See this paper on IEEE.org
-
Rivera, L. A. and DeSouza, G. N.,
“Recognizing Hand Movements from a Single sEMG Sensor using Guided
Under-determined Source Signal Separation”, IEEE 12th International
Conference on Rehabilitation Robotics, pp.1-6, June 29 - July 1, 2011, ETH Zurich, Switzerland.
See this paper on IEEE.org
|
