|
In the
long term, the main goal of our research in the ViGIR Lab is to build an
augmented and virtual reality deck (or, as I call it, a Holodeck) where
robotic systems can interact with and learn from humans by observing their
actions. The learning part will take place at the same time as the human
demonstrations are taking place in the augmented reality environment. That
is, in these so called Holodecks, humans will perform tasks such as: the
tedious assembly of industrial parts; rescue, maintenance, and exploration
in hazardous environments such as deep seas, space exploration; etc. All of
this by interacting with safe computer generated representations of these
environments. (see holodeck1.jpg)
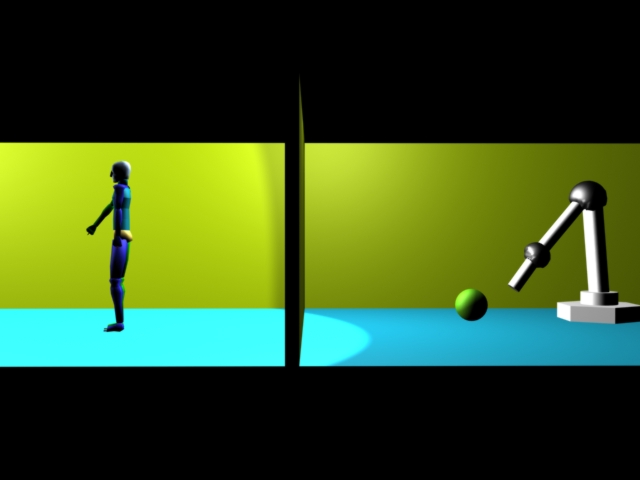
In order to do that, inside the
Holodeck vision systems will capture the motions of heads, legs, arms,
hands, and fingers and "transfer" these motions to actual robotic
counterparts -- mobile robots, industrial robots, etc. These robotic
counterparts will perform the desired task, which may be also simply
mimicked by the robots so they can be reproduced more precisely and a large
number of times.
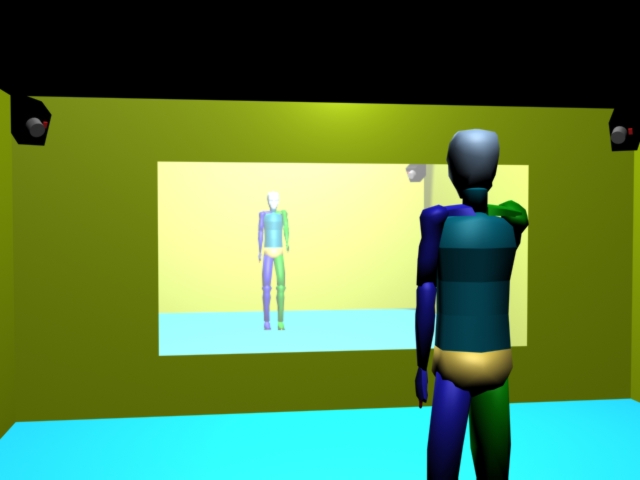
Note that humans will perform the
tasks in the augmented reality environment exactly as if they were at the
real location. The human motions will then be analyzed by real and virtual
cameras that will capture and present the motions from different vantage
points. The learned motions will then be used to establish control set
points for real robotic execution of the same task in the real environments
with the help of multi-stereo tracking and visual servoing.
Most of the research projects below
are related to the construction of this Holodeck.
More details to come ...

Details:
- PowerPoint Presentation
- Website
|
