|
Towards Semantic labeling of
3D Point Clouds
by
Akshay Jain
Introduction
This report
describes the progress done by the author in developing a system
to use semantic information for understanding scenes and
identifying objects. The first two steps to perform this task
are segmentation and feature computation.
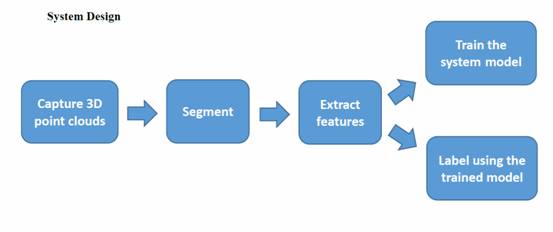
For the
segmentation step, the point cloud is segmented into different
regions based on a region growing algorithm similar to Euclidean
clustering but adding smoothness constraint with the Euclidean
distance. Then for feature extraction, two sets of features are
calculated to represent each segment. These are 2D features
which represent the visual appearance of the segments and 3D
features which describe their geometry.
The algorithm
was able to classify objects with a classification rate of 76 %
when the objects under consideration were different (table top,
chair back rest, monitor). It is observed that in all the cases
that the classification using only visual features is better
than the using only 3D features. When the number of objects to
be classified are increased, the classification rate is dropped.
But even for small number of objects, for example, wall and
floor, the classification rate is not high. The floor is
confused a lot with the wall.
|
