|
Calibration of Vision-Sensor
Networks
by
Kyng min Han
Automatic camera calibration of a multi-camera rig
The goal of this research is to eliminate any human
intervention from calibrating multi-camera system. For a
given image data set, the system finds the best subset of
images which optimizes the camera calibration. The algorithm
procedure is as following
1. Collect images: In the beginning, human just
wander around inside of the camera rig. Each camera grab images
at the same time.

2. Feature point detection: We use Hough
transform to detect lines. Feature points are the intersection
of these lines.
3. Selecting the best input data set: The
proposed frame work determines the best subset of images that
can optimize the camera calibration process (9 sets for each
cameras)
4. Determining a reference coordinate frame:
Once the calibration is done, then the algorithm decides the
reference coordinate frame and a camera path tree. Using this
path tree, one can easily bring image points in some other
camera cameras to the reference frame.
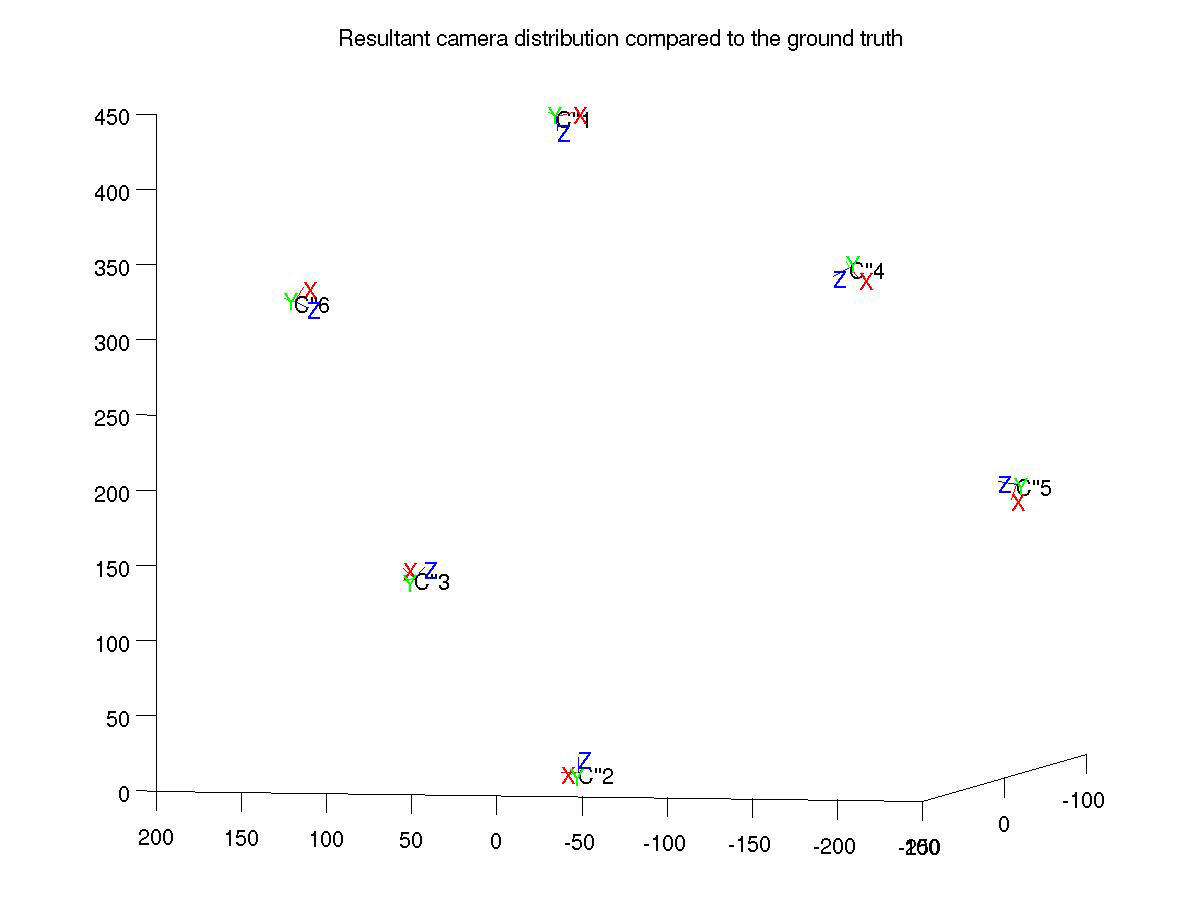
5. Extrinsic parameter test: Above figure
illustrates the real camera positions in our lab (left) and
reconstructed camera frames (right) by their extrinsic
parameters.
6. 3D Object reconstruction: Here I made a
cross shape like object. The four corner points (Tips of each
bar) are reconstructed.
 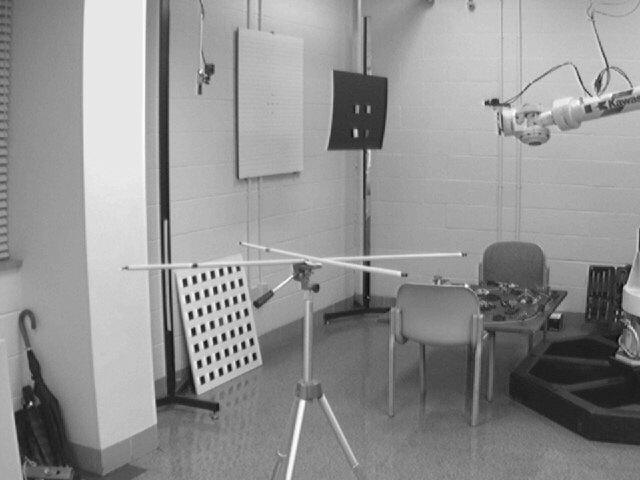 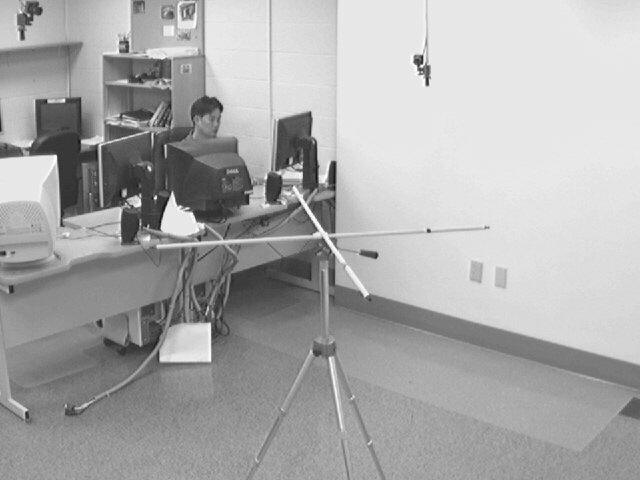
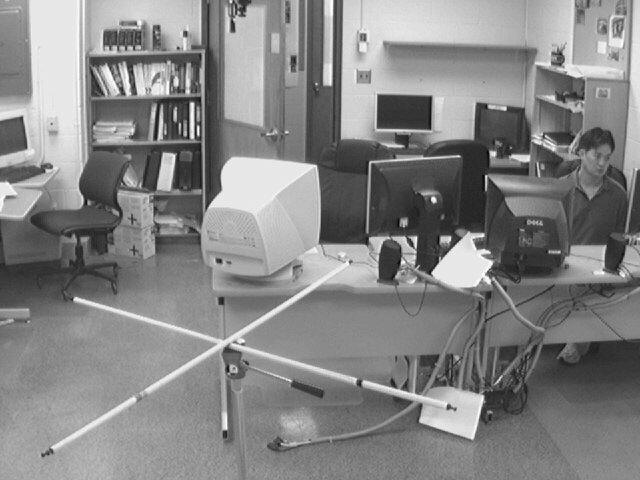 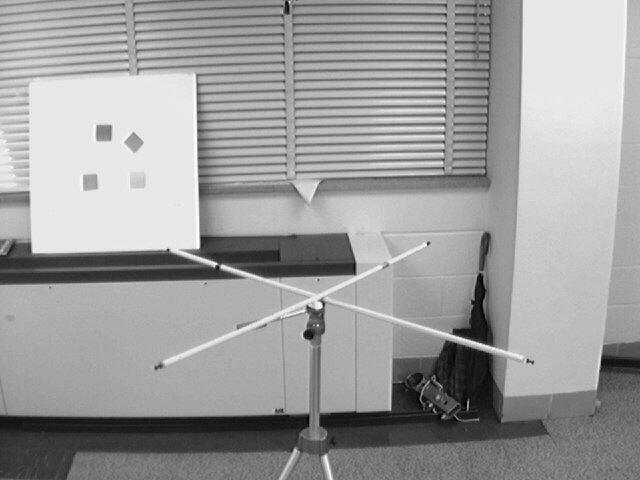 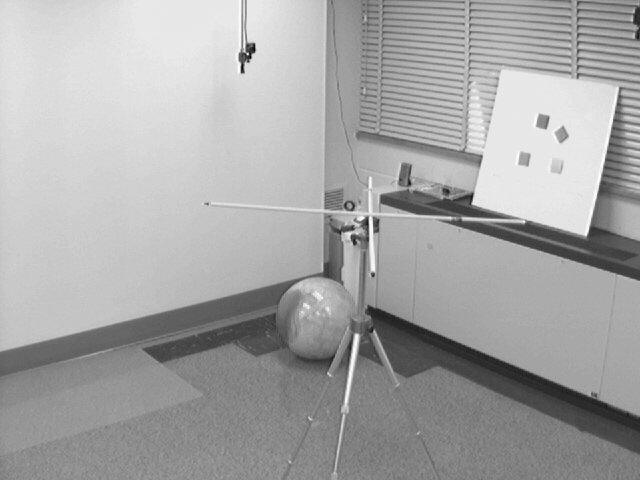
Object views from 6 different cameras
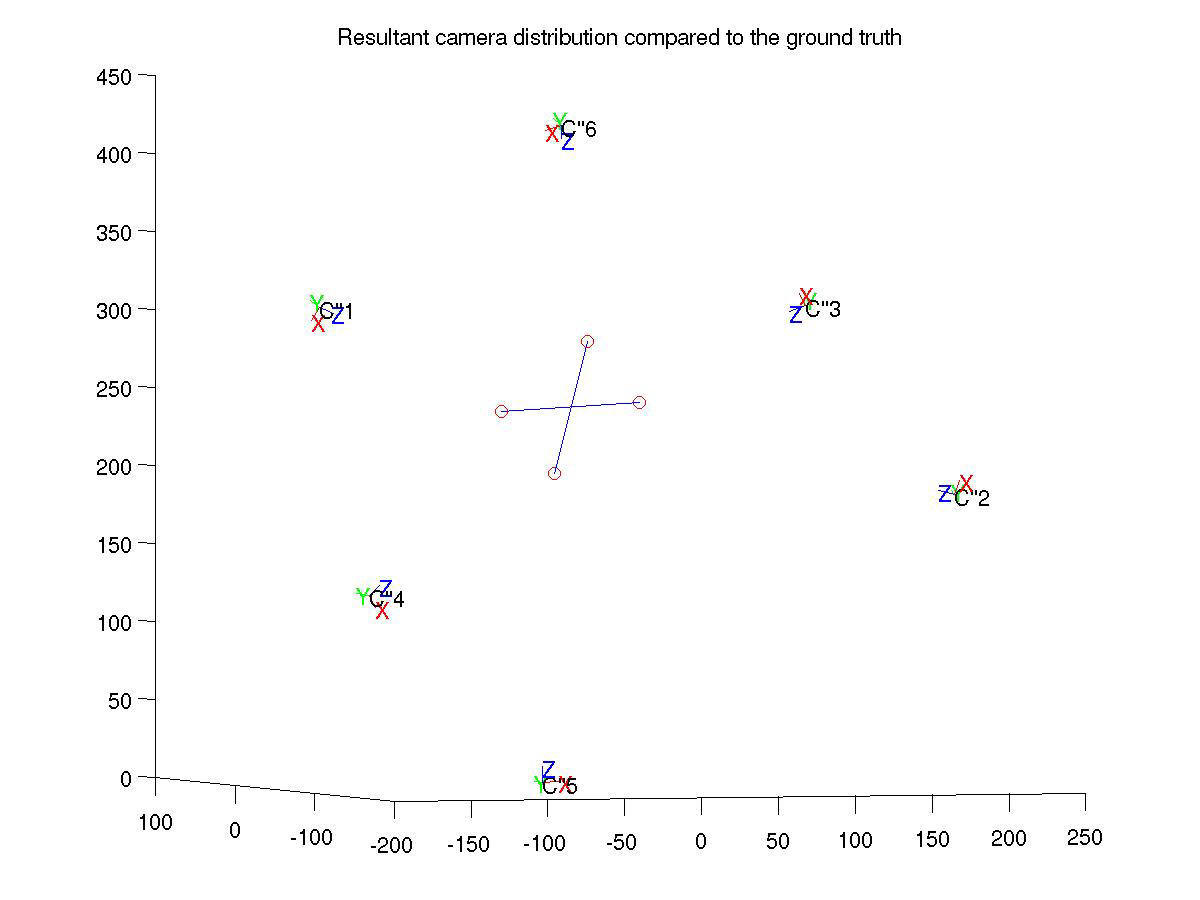
Reconstructed points (red circles)
Results a) Real Camera positions b) Reconstructed
camera coordinate frames References
-
Han, K., Dong Y. and DeSouza, G.N.,
"Autonomous Calibration of a Camera Rig on a Vision
Sensor Network," in the Proceedings of the 2010 IFAC International Conference
on Informatics in Control, Automation and Robotics (ICINCO), June 2010, Portugal.
-
Han K., DeSouza, G. N., "A Feature Detection Algorithm for Autonomous
Camera Calibration", in the Proceedings of the 2007 IFAC International
Conference on Informatics in Control, Automation and Robotics (ICINCO), pp.
286-291, May 2007, France.
|
