|
Control of a Wheelchair
using an Adaptive K-Means Clustering of Head poses
by
Luis Rivera
and
L. Danny Franklin
Old Demo Video
-- First Prize in the IEEE-CIS Undergrad Student Poster
Competition Introduction
Operating a wheelchair is often a
difficult task for individuals with severe disabilities. Also, with the progress
of the condition, the use of most current robotic assistive technologies becomes
less attractive or simply not applicable anymore. In this work, we developed a
system that allows a user to operate a wheelchair using only their heads. Our
method utilizes an Infrared (IR) depth sensor to capture the user’s head pose,
while it includes an adaptive component to the detection of that pose. The
adaptation, based on a type of Re-enforcement K-Means clustering, can
accommodate users with limited and changing head mobility – no matter how skewed
the head motion may become with the progress of the condition.
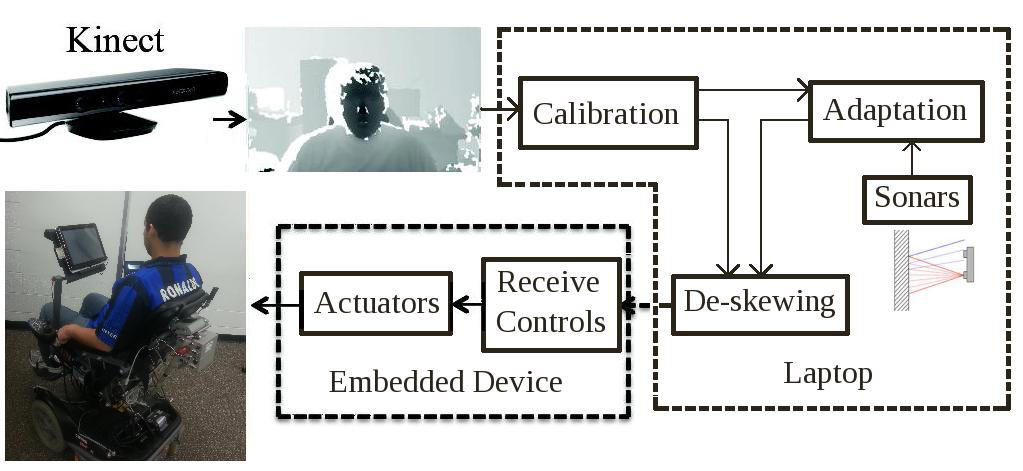
Calibration and Normal Driving: Our
system begins by performing a calibration of the head motions to
tailor the algorithm to each user. The calibration is quick and
simple, and it allows the user to set the coordinates of the
control system to the most comfortable configuration. After the
system is calibrated, the wheelchair is easily controlled
through the user’s head motions.
Head_Wheelchair_video_normal.wmv
Skewed Head poses: Some people may have difficulties to
move their heads orthogonally, and they may have limited ranges
of motion. The system can adapt to these situations, allowing
users with different degrees of disabilities to control the
wheelchair.
Head_Wheelchair_video_tilted.wmv
Adaptation: Over short periods of time, users may become
fatigued and they may need to reposition their bodies on the
wheelchair. Also, over long periods of time, the disease may
progress, imposing greater limitations on the ranges and angles
of the head motions. In either case, the head motions may start
deviating from the calibrated poses. The system can adapt to
such changes “on the fly”, without needing a recalibration.
Head_Wheelchair_video_adaptation.wmv
References
- Rivera, L. A., Franklin, L. D. and DeSouza, G. N.
“Control of a Wheelchair using an Adaptive K-Means
Clustering of Head Poses”. IEEE Symposium Series on
Computational Intelligence, Symposium on CI in
Rehabilitation and Assistive Technologies, April, 2013.
Singapore.
|
