|
Target Tracking from Airborne Video by
Kyng min Han
Motivation
Reconnaissance and surveillance in urban environments is a
challenging problem especially because of the usual limited
visibility, the complexity of background activity, etc.
These problems can be further worsened if the source of the
video imagery is airborne. In that case, the motion of the
camera increases the background activity and tasks such as
segmentation of target objects from the background becomes
even more difficult. Unfortunately, without such
segmentation of potential targets, the detection, the
identification, and the geo-location of these same targets
would have to be carried out on the entirety of the image
frame, increasing the possibility of false detections and
making it even harder to be accomplished in real-time.
In this research, we developed a fast, real-time, and
effective method for segmentation of multiple moving targets
from moving backgrounds. The method relies on the
calculation of a differential optical flow, which can
separate the motion of the airborne camera from the moving
targets. Once segmented out from its background, the images
of possible targets are handled as independent ROIs (regions
of interest). Each ROI can be streamed into the second phase
of the algorithm for tracking and geo-location of specific
targets.
Algorithm overview
The algorithm always requires two images: the current image and
the previous image. As soon as these images are read from disk,
the Phase 1 of the algorithm calculates the Optical Flow of the
current image with respect to the previous one – since the
algorithm runs in real time (30fps) the images can also be fed
directly from a camera. In Figure 2, we depict two typical
images in a video sequence.
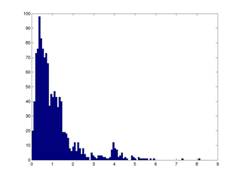
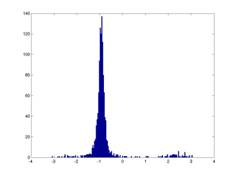
The OF (Figure 3a) is then analyzed and two histograms are
built. The histograms represent the distributions of the pixel
velocities in terms of their magnitude and orientation (Figure
4). Based on these distributions, we can separate the foreground
image from the background. Each foreground blob is them
processed and segmented using a morphological filter and a
component labeling algorithm.
 
(a)
(b)
Figure 2 – Original sequence: airborne camera moves towards
northwest, while the gray car in the center of the image moves
in the same direction.


(a)
(b)
Figure 3 – Optical Flow, before (a) and (b) after removal of
background motion (but before filtering of spurious flows
in the image).
(a)
(b)
Figure 4 – Histogram analysis of the Optical Flow. (a)
Magnitudes and (b) Angles.
A ROI is defined around each object segmented from the
background and, based on the object’s velocity and size, the
most prominent ROI is streamed into the second phase of the
algorithm. Figure 3b presents a group of blobs clustered by the
similarity of their OF. This is the result obtain before the
morphological filtering and component labeling. Figure 5a
presents the output at the end of Phase 1, with one single ROI
already delineated.
Single target tracking - A dominant
moving target can be segmented out by the method discussed
above. Notice that there is a severe background motion in
the video below.

- When a moving target is found by the phase I processing
(optical flow method), it opens a ROI on the centroid of the
target. Then the phase II processing tracks each object in
each ROI.
Multi-target tracking using threads - The above
approach can be easily extended by using multi threading. That is,
each thread process each detected target. Theoretically, it
is possible to run each thread in different machine, so that
even multi-tracking task can be achieved in real time.

References
-
Han, K. and DeSouza, G. N.,
"
Two Phased Bayesian Filter Applied to Vision Based Geolocation
of Moving Targets",
Journal of Intelligent and Robotic Systems (submitted)
-
Han, K. and DeSouza, G. N.,
"
Target Geolocation from Airborne Video without Terrain Data:
A Comprehensive Framework",
Journal of Intelligent and Robotic Systems (accepted).
-
Han, K., Dong Y. and DeSouza, G.N.,
"
Tracking Moving Objects from Airborne
Video Using Sparse SIFT Flows and Relaxation Labeling",
in the Proceedings of the
2011 IEEE International Conference on Robotic System (IEEE-ICRA) (submitted).
-
Han, K. and DeSouza, G. N., "Multiple Target Geo-location using SIFT
and Multi-Stereo Vision on Airborne Video Sequences", in Proceedings of the
2009 IEEE International Conference on Robotic System (IROS), pp. 5327-5332, Oct./09.
-
Han, K. and DeSouza, G. N., "Instantaneous Geo-Location of Multiple
Targets From Monocular Airborne Video", 2009 IEEE International Geoscience &
Remote Sensing Symposium (IGARSS), pp. IV 1003-6, July 2009, Cape Town, South Africa.
|